
A (not so) Brief History of the HFCRP.
Wrong, wrong wrong. Absolutely brimming over with wrongability. - Arnold Rimmer
The HydroBot has been a real evolutionary project. Since none of us had the slightest clue about hydrogen fuel cells or robots when we began, time and time again our expectations of how things would work out has been wrong. One of the best characteristics of this project has been that all of us have been students together, exploring an uncharted corner of science.
Note: In the text below, you will find me referring to "the old days", which were only three years ago at most. However, fuel cell technology and availability really has changed a lot in just the last three years.
Another Note: This is the first robot I have ever worked on, and I only started playing with Stamps and other microcontrollers about six months before we started this project. So, along with trying to figure out the fuel cell stuff, we had my learning curve to make life more interesting! During the course of the project, I have smoked some expensive components, recommended we spend money on things that didn't pan out and been the staunch advocate of some ideas that didn't work. It's really been quite a learning experience for me.
The HFCRP was started with a grant from the Mendocino Unified Schools Enrichment. M.U.S.E. has continued to support the project, along with quite a number of businesses. The general level of willingness to help the project has been amazing! Please check out the Sponsors page, and support those businesses that support education! Many thanks go out to all that have helped and especially to M.U.S.E. for their continued support of both the HydroBot and the Science Club.
During the first year the focus was on learning to use fuel cells and to develop a power supply capable of running a robot. We started with a couple of very small reversible P.E.M. (Proton Exchange Membrane) cells that Tobin and I already had. A reversible cell can perform electrolysis to produce hydrogen and oxygen, and then use the gases produced to generate electricity. A small solar panel is used to provide the power required for the electrolysis. This is a very slick closed system.

Small reversible P.E.M. cell
These fuel cells could produce about 1.5V at 1 amp, or 1.5 watts. This voltage is far too low to run the Stamp and the rest of the electronics We tried to use DC to DC converters to step the voltage up to the required 5V but could only get about 3V @ 300mA. I spent a lot of time trying to make the converters as efficient as possible, but to no avail. I now realize that we just didn't have enough power, but at the time I was bent on making it work.
After admitting we needed more power, we began to shop around for fuel cells and information about fuel cells. While more information is available now, at that time it was hard to come by solid, reliable information. We got wildly varying information, and it was difficult to figure out what power we could expect out of which cells, along with a hundred other questions concerning fuel cells in general. We discovered that many fuel cell companies are fly-by-night operations, and nearly sent money to a firm that went under just weeks later. At that time, fuel cells seemed to come in two sizes, too small and way too big. Nobody (and this seems to still be true) made smaller reversible cells.
Finally, we got in touch with The Fuel Cell Store. We bought a 3 watt alkaline fuel cell from them. When it arrived, however, we found that it was going to be too complex to use on the robot. So we sent it back, and got a 3W convection PEM cell. We very nearly got the system running with this cell, but we still couldn't get quite enough power for reliable operation and have enough spare juice to run added systems later on. Knowing what I know now though, I believe a small robot could be powered from a cell like this.

3 watt P.E.M. Cell
At this point, I was in a bit of a funk. We had been trying hard and pouring hours and money into this project for almost a year now, and we seemed little closer than when we began. I have to hand it to Tobin for keeping his chin up and bucking me up. It was obvious that yet again, we needed a bigger fuel cell. The budget however, was tapped, and it looked like the project was going to have to go on hold.
This is where the Fuel Cell Store stepped in and saved the day. Unbelievably, they offered to let us return the 3W and send us a 10W cell in exchange, with them donating the balance of $600!! Finally, we had a cell with enough power and some to spare!!
10 watt P.E.M. Cell
A big, big thanks goes out to Kate and the Fuel Cell Store!! The project would have been in deep trouble without their generous assistance.
At the same time, we were experimenting with different fuel tank possibilities. We did not want to use a high pressure system for safety reasons. So, at first, we used 1 liter plastic containers, submersed in water to provide pressure. This of course was silly, and never would have worked on a robot, but heck, we had to start somewhere! Then one of the club members came up with the idea of a flexible fuel tank. The first attempts along these lines used Mylar helium balloons. It worked much better than the first system, that's for sure!

Modified balloon tank
The balloons were too large to put on a robot, so we developed a technique of using an iron to heat seal the balloon into a smaller circle, then cut away the excess. We discovered at that time that the inks from the balloons really make a mess of the iron, and can spread all over the place if you aren't careful.
Making a good seal to a tube to connect to the fuel cell was also a problem. Our solution was to cut the balloon apart, then use silicon sealant to seal a tube into a balloon. Once the silicon had dried, we would heat seal the balloon with the iron. This worked pretty well, but the "fuel tanks" made this way had a limited life before they would pop. Also, we think we may have damaged a fuel cell with the acetic acid that evolves from silicone caulking during the curing process. This was never confirmed, but we did have a fuel cell mysteriously die on us after we switched to this system.
Finally, we started looking around for a real "bladder" or "pillow" tank. I looked and looked until I ran across Peter Regena at Areo Tec Laboratories. They made us two 8" by 8" pillow tanks, and sent them to us for free! They even marked then the tanks with "DANGER HYDROGEN" . This is a wise safety precaution, and looks cool too. Many thanks to Peter and ATL!. These tanks have been perfect for us. They hold enough fuel for a decent runtime, and dispense most of the fuel without any need to squeeze them.

Pillow tank
The first version of the robot had a tower with a sliding platform intended to press the tanks flat, which we called the weight platform. It turned out not to slide very well, and the tanks dispense well on their own, so the weight platform was removed.

Weight platform
The next issue we had to deal with was the need to flush the fuel cell. During normal operation, moisture builds up inside the fuel cell. When it builds up to a certain point, the voltage of the fuel cell drops off rapidly. If the fuel cell is vented for a moment, then the moisture is flushed out, along with a little hydrogen, and the voltage of the cell rises.
At first, we used a fine needle valve on the outlet of the fuel cell. This kept the moisture from building up, but of course was very wasteful and a potential fire hazard. We noticed that we could keep the outlet closed, and open the valve briefly when the voltage dropped. This is known as "dead ending" the fuel cell. Thus, we decided to get a solenoid valve to automate this process. For more details on the fuel system, click HERE.
During the first school year we were also working on a controller circuit. This consisted of several breadboards with wires and components everywhere. While it was mostly functional, it had grown to the point where tracking down loose wires and such became quite a headache. It was time to make some sort of controller board for the robot.
Over the first summer, I designed and made a controller board, which we call the RCOM (Robot Controller Onboard Module). While far from perfect, this controller was much better than the breadboards! It has subsequently been modified substantially, but over all has done very well, with many hours of runtime. Long may it retain it's magic smoke! Details of the RCOM can be seen HERE.

The before many modifications RCOM
I want to make it very clear that the reason we decided to have me build the controller board over the first summer was not because we felt the students weren't up to it. It was simply a question of not being able to get enough hours in on the robot during club hours. As we had no plans to go by, development sucked up hours like a black hole. If the project was going to move forward at a reasonable pace, Tobin and I had to do some of the work ourselves.
So, we started the second year of the project with the RCOM, the 10W fuel cell and the pillow tanks. After a few sessions devoted to learning the RCOM and how to use and program it, the students began working on building the chassis.
They laid out the components and figured out spacing and sizes. Using sophisticated C.A.D. ( Cardboard Aided Design) techniques, they mocked up the robot and made sure that everything would fit.




Once the design was complete, construction began.




Excitement began to mount as the robot took shape.


Of course, we got it almost done on a Thursday, and had to wait until next Tuesday to complete and test the robot. Argh!
Almost ready for testing!
On the Tuesday morning, I woke up with that feeling you got waking up on your birthday when you were a kid. Time dragged until after school. You can bet that the club members wasted no time in getting to work. The last bits of assembly were completed, the tank was loaded with fuel and a crude program to simply drive the robot forward had been written and loaded into the 'bot. On the test stand, the switch was flipped. It seemed to work!
Now for the final test. Fingers crossed, the robot was placed on the floor and lo and behold! The robot began to crawl across the floor powered by hydrogen, and the HydroBot was born!!

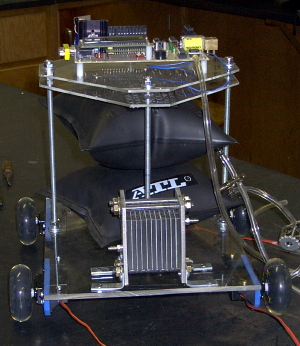
Rev. 1.0
As you can see, the first version of the HydroBot was four wheel drive. This made it an outrageous climber. It would power over just about anything in its way. However, we found a lot of problems with turning. The plan was to drive the servos at different speeds to compensate for the lack of a differential. However, we found that we couldn't vary the speed of the servos enough to accomplish this. Thus, whenever we turned, the robot would shudder and shake. It was so bad that it was damaging the servo bearings. It also caused us to draw way too much power, and led to a lot of unnecessary fuel cell flushing.
As a further complication, since the fuel cell flushing was being handled by the Stamp, during turns the robot could go into a perma-turn-and-flush mode. Since the Stamp was occupied flushing the fuel cell, it couldn't respond to the command to stop turning. So, the robot could sit and spin while dumping it's hydrogen. Not as effective as one might desire!
Two measures were undertaken to solve this problem. Firstly, we built a fuel cell co-processor module based on a PIC12F675. You can see details of the module HERE.

While this solved the perma-turn-and-flush problem, it did not solve the bearing damage and excessive current draw. To that end, the robot was modified to be a tripod design, with two drive wheels and one caster type wheel. This arrangement works well, but the HydroBot can now only operate on smooth surfaces.
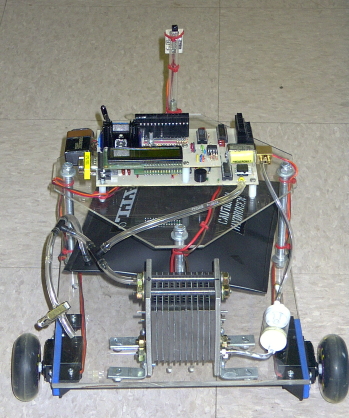
Rev. 1.1
Initially, we controlled the robot with a small RC car control that was laying around the classroom. It worked, but had a range of about 18". Hardly ideal, but at least it was free. Next, we made an infrared module that allowed us to use a universal TV remote to control the robot. You can see details of the IR module HERE.

IR remote module
This was a big step up. Not only could we operate the robot this way, but we could also change the fuel cell flushing settings. This was a huge plus, not having to hook up to a serial cable and reprogram the Stamp to change the fuel cell settings. It wasn't a perfect system though. The control was line of sight, ambient light reduced range, and the data stream speed for real time control was just barely acceptable. On the other hand, it was cheap, always a big plus in school projects!
This bring us to the end of the 2003/04 school year. As the project enters its third year, it is only getting more and more fun! The greatest part is that I have no idea what will happen or how it will happen. I can't wait to find out!